ECE :: Automatic Control Systems
-
A system has 12 poles and 2 zeros. Its high frequency asymptote in its magnitude plot has a slope of
-
The open loop transfer function of a unity feedback system is
 The poles of closed loop system are at
The poles of closed loop system are at -
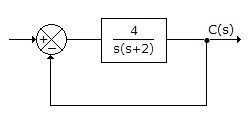
For the system of the given figure the closed loop poles are located at
-
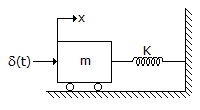
The system in the given figure, x(0) = 0 and x (0) = 0, At t = 0 the unit impulse δ(t) is applied X(s)
-
If
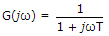 the polar plot, as the frequency is varied from 0 to infinity is
the polar plot, as the frequency is varied from 0 to infinity is -
A second order system has damping ratio x and natural frequency ωn. The unit step response is
-
For a first order system having transfer function
 , the unit step response is
, the unit step response is -
Which of the following is not a necessary advantage of negative feedback system?

 Whatsapp
Whatsapp
 Facebook
Facebook



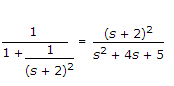 for s2 + 4s + 5 = 0, the roots are - 2 ± j1.
for s2 + 4s + 5 = 0, the roots are - 2 ± j1. .
. 




 .
.
 .
. is
is and is less than 1.
and is less than 1. .
.
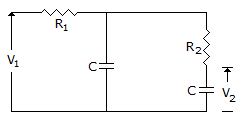




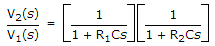 Since R2 > > R1 the term 1 + R1Cs is small as compared to 1 + R2Cs. Hence the factor
Since R2 > > R1 the term 1 + R1Cs is small as compared to 1 + R2Cs. Hence the factor  can be neglected.
can be neglected.