ECE :: Signals and Systems
-
For a wave v = V 1m sin (ωt + θ1 ) - V3m sin (3ωt + θ3), the rms value is (0.5 V21m + 0.5 V23m)0.5
-
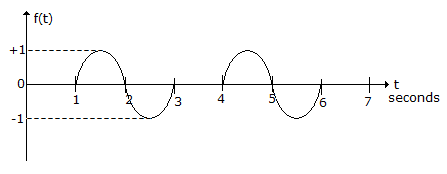
The function in the given figure can be written as
-
consider the following as regards probability distribution function f(x)
- f(x) = 0 for all x

- cumulative distribution function

-
Pick out the odd one
-
X and Y are two random variables and Z = X + Y . Letmz, mz, mx, my represent mean of Z, X and Y. Then





 Whatsapp
Whatsapp
 Facebook
Facebook



 , f(t) =
, f(t) =





